Dobb·E
About Dobb·E
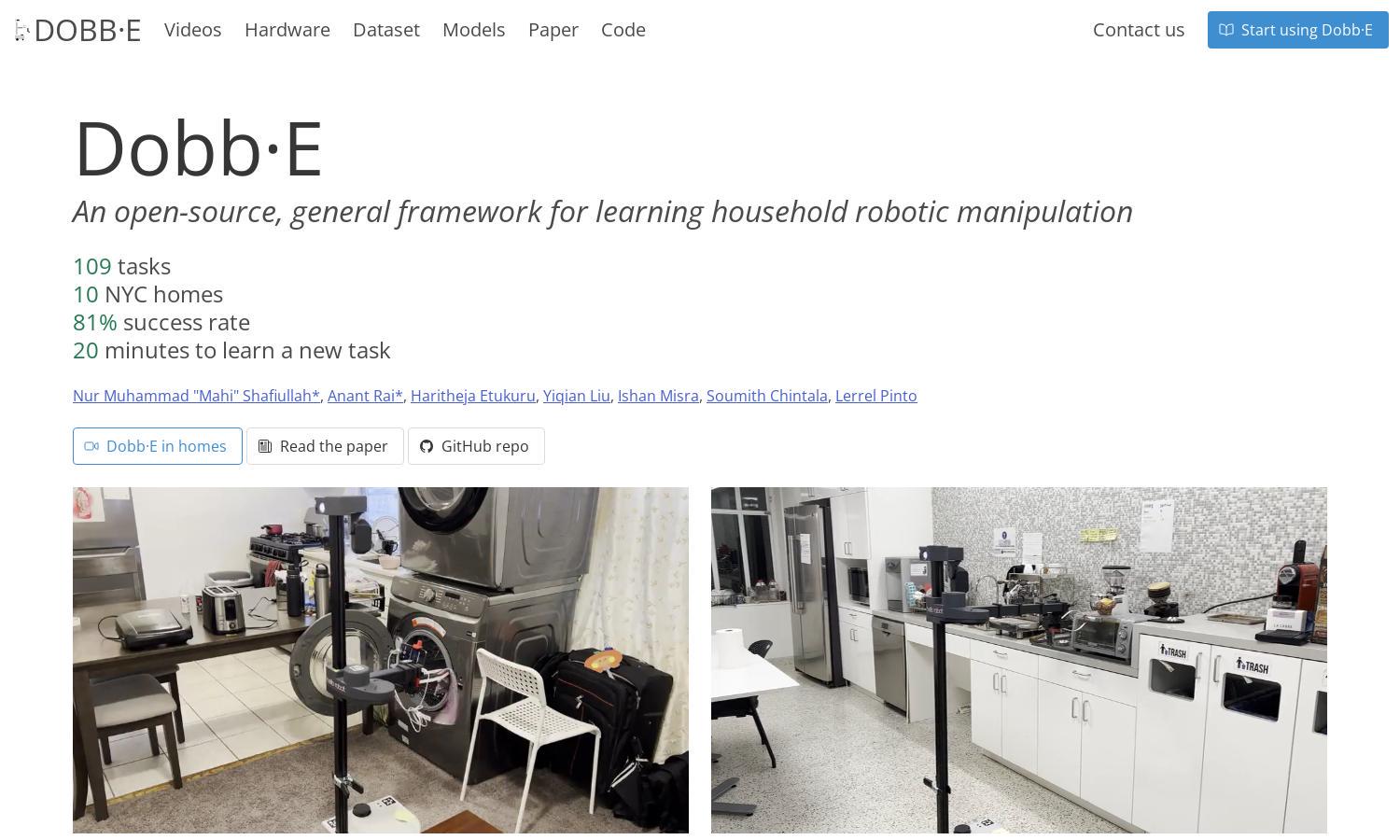
Dobb·E is an open-source framework that revolutionizes home robotics by enabling robots to learn household tasks through imitation learning. With a unique tool called the Stick, users can train robots swiftly, leading to seamless task execution. It addresses the need for adaptable robotic assistants in homes.
Dobb·E offers free access to its framework and tools for users interested in home robotics. While the platform is primarily free, advanced features and support may be recommended through donation-based models. Engage with Dobb·E to enhance home automation at no cost.
Dobb·E features a user-friendly interface designed for effortless navigation and task learning. The layout facilitates easy access to essential tools like the Stick and datasets. This intuitive design enhances the user experience, making home robotics more accessible and engaging for beginners and experts alike.
How Dobb·E works
Users begin by accessing the Dobb·E platform, where they utilize the demonstration tool known as the Stick to showcase specific household tasks. Within five minutes, the framework collects demonstrations and, through a quick adaptation period, allows the robot to learn and execute the task effectively. This process leverages advanced algorithms for successful task execution, making robotics accessible to everyone.
Key Features for Dobb·E
Imitation Learning
Dobb·E's unique imitation learning technique empowers robots to learn household tasks through user demonstrations. This feature enables quick task acquisition and adaptability, making it possible for users to train robots efficiently within minutes. The result is a practical home assistant capable of handling daily chores.
Dataset Homes of New York (HoNY)
Dobb·E utilizes the Homes of New York (HoNY) dataset, a comprehensive collection of interactions across 22 homes. This large-scale dataset enhances the intelligence and adaptability of robotic systems, enabling them to perform tasks in various environments with high success rates, ultimately leading to better user experiences.
Home Pretrained Representations (HPR)
Home Pretrained Representations (HPR) is a model developed by Dobb·E, trained on extensive household data. This advanced model provides a robust foundation for robots to generalize and perform well across different tasks and environments, significantly improving performance and reliability in real-world applications.








